Troubleshooting
menggunakan pendekatan ini mengacu pada seven OSI layer (Gambar
1), dimana proses troubleshooting dimulai dari layer 7 terlebih dahulu baru
kemudian turun ke layer di bawahnya hingga ditemukan permasalahannya.
Gambar
1. Seven OSI Layer
Troubleshooting
menggunakan pendekatan ini merupakan kebalikan dari pendekatan Top Down, dimana
proses troubleshooting dimulai dari layer 1 atau layer physical baru
kemudian naik ke layer atasnya.
- Pendekatan Divide
and Conquer
Troubleshooting
menggunakan pendekatan ini merupakan gabungan daru dua metode diatas (Top Down
dan Bottom Up), dimana proses troubleshooting bias dilanjutkan ke atas atau
kebawah, tergantung problemnya. Troubleshooting menggunakan pendekatan ini
biasanya dimulai dari layer 3 atau 4 dari OSI layer baru
kemudian diteruskan ke layer 5 atau 2 hingga layer 1 atau layer 7.
- Pendekatan find
the difference
Troubleshooting
menggunakan metode ini adalah mencari perbedaan konfigurasi jaringan di bagian
lain yang fungsinya sama dengan bagian yang bermasalah. Konfigurasi yang
berbeda di bagian jaringan tersebut sementara dapat disimpulkan menjadi
penyebab terjadinya problem.
- Pendekatan locate
the problem
Troubleshooting
menggunakan pendekatan ini adalah mencari perangkat mana yang bermasalah atau
bagian mana yang bermasalah dengan memanfaatkan pendekatan 1 – 3 diatas.
Mencari perangkat yang bermasalah dapat menggunakan tool traceroute.
Visual Inspection
Regardless
of technological advancements in inspection techniques the primary and most
important inspection / test technique is visual inspection.
Time has proved that visual inspection is the most effective
technique of all. Other techniques can be employed if and when the welds or
parts to be examined are considered visually acceptable to specification
requirements.
Visual Inspection is a very effective inspection method, and it
should be the primary method included in any effective Quality Control Program.
It has been shown repeatedly that, “Visual inspection” conducted by
properly trained inspectors, results in the discovery of the vast majority of
those defects which would only be discovered later by some more expensive
non-destructive test method.”
While visual inspection is limited to materials surface-only
examination, it often detects the most damaging defects. Visual inspection
(abbreviated“VT’ )by the American Society for Non-destructive Testing (ASNT) of
welded components requires inspectors to have a broad knowledge of many
technologies, including welding, destructive testing, non-destructive testing,
and metallurgy, as well as the correct terminology for each.
Because of the importance of the technique, the first training
course and inspection approval every EIS technician will undergo in PCN Visual
inspection.
Weld quality assurance is
the use of technological methods and actions to test or assure the quality of
welds, and secondarily to confirm the presence, location and coverage of welds.
In manufacturing, welds are used to join two or more metal surfaces.
Because these connections may encounter loads and fatigue during
product lifetime, there is a chance they may fail if not created to proper
specification.
Half-Split
The Half-Split Method (also
known as the Divide-and-Conquer
Approach) is generally used by more experienced
technicians. The technician will use their experience to make an educated guess
as to where the fault may lie, and then progress forward or backward in the
particular circuit whether it be. This approach works for technical,
networking or software problems.
The method is a logical way of applying the system knowledge to
isolate the fault. It’s essentially a binary progression.
For example as a technician, you would check the
signal at a point in the middle of the system. Is it good or bad?
If it’s bad, choose a point midway between there and the front
of the system; if it’s good, pick a point midway between there and the system
output. Again, is the signal good or bad?
Continue this way, always splitting the remaining section and
moving toward the bad area until you find the faulty part.
On a complex system, this method saves troubleshooting time by
allowing you to eliminate half of the remaining system with each test.
What could have taken an hour in a sequential search has taken 10 minutes or
less.
Good
documentation is also required. While a fault chart or
troubleshooting tree are handy, the best documentation will also include an
explanation of system operation and the interaction of the sub
components. Good documentation and overall experience can substitute for
equipment knowledge, but only just.
Even an experienced technician without
documentation wouldn’t have the first idea how to find a problem in an
unfamiliar system except to trace the signal through point-by-point.
An example would be the system below. It depects a
computer system with a number of distinct blocks. One way to fault find
this would be to start at Block A and continue checking each block until the
fault is found, this would be the linear approach. However a more
efficient way to test this system would be to start testing between block C and
D. If this works, then go forward to testing between E and F. If not,
then go back to testing between blocks A and B.
This depicts a small simple system, however in large systems the
half split method can significantly save time.
njeksi Sinyal sebagai Teknik Deteksi Kesalahan
Jordi
Cusidó , * Luis
Romeral , Juan
Antonio Ortega , Antoni
Garcia , dan Jordi
Riba
Artikel ini telah dikutip
oleh artikel lain di PMC.
Abstrak
1.
Perkenalan
Sejarah diagnosis dan perlindungan kesalahan adalah setua
mesin itu sendiri. Pabrikan dan pengguna mesin listrik pada awalnya mengandalkan
perlindungan sederhana terhadap masalah seperti arus berlebih, tegangan lebih,
gangguan-bumi, dll. , Untuk memastikan operasi
yang aman dan andal. Namun, karena tugas yang dilakukan oleh mesin ini menjadi
lebih kompleks, perbaikan juga dicari dalam bidang diagnosis kesalahan. Sekarang menjadi sangat penting untuk dapat mendiagnosis
kesalahan pada saat permulaannya, karena penghentian mesin yang tidak terjadwal
dapat mengganggu tenggat waktu dan menyebabkan kerugian finansial yang sangat
besar. Kesalahan utama dari mesin listrik
secara luas dapat diklasifikasikan sebagai berikut:
Kesalahan listrik :
- kesalahan stator mengakibatkan
pembukaan atau kekurangan satu gulungan stator atau lebih;
- koneksi yang tidak normal dari
belitan stator;
Kesalahan mekanik :
- 3. bar rotor yang rusak atau
cincin akhir rotor;
- 4. penyimpangan celah udara
statis dan / atau dinamis;
- 5. poros bengkok (mirip dengan eksentrisitas
dinamis) yang dapat mengakibatkan gesekan antara rotor dan stator,
menyebabkan kerusakan serius pada inti stator dan belitan;
- 6. kegagalan bearing dan
gearbox.
dan
frekuensi di mana berbagai jenis kesalahan biasanya terjadi ditunjukkan
pada Gambar 1 :

Distribusi statistik kesalahan motorik.
Mengoperasikan
mesin yang rusak menghasilkan setidaknya satu dari gejala berikut:
- tegangan celah udara dan arus
saluran yang tidak seimbang;
- peningkatan denyut torsi;
- penurunan torsi rata-rata;
- peningkatan kerugian dan
penurunan efisiensi;
- pemanasan yang berlebihan.
Banyak
metode diagnostik telah dikembangkan untuk mendeteksi sinyal yang berhubungan
dengan kesalahan tersebut. Metode-metode ini berasal dari berbagai jenis dan bidang
sains dan teknologi, dan dapat diringkas sebagai berikut [ 1 - 4 ]:
- Pemantauan medan elektromagnetik
dengan cara mencari gulungan, dan gulungan ditempatkan di sekitar poros
motor (deteksi terkait fluks aksial). Ini
terkait dengan kapasitas untuk menangkap keberadaan medan magnet di sekitar
IM. Evaluasi lapangan harus memberikan
informasi tentang keadaan operasi motor seperti yang diusulkan oleh
Zidat et
al. [ 4 ], tetapi ini adalah proposal yang
mengganggu.
- Pengukuran suhu: suhu adalah
efek orde dua khas dalam kondisi operasi. Motor induksi biasanya memiliki kisaran suhu
operasional, ditentukan dalam pelat nama motor, dan terkait dengan
pengujian yang dilakukan. Setiap
kondisi operasi kesalahan menunjukkan kenaikan suhu. Dengan melakukan analisis suhu, pendekatan pertama untuk
mengidentifikasi kondisi gangguan dapat dilakukan.
- Pengenalan inframerah: ini
digunakan untuk mengevaluasi keadaan material, terutama untuk bantalan. Ini tidak dapat dilakukan dalam sistem online.
- Pemantauan emisi frekuensi radio
(RF): frekuensi radio adalah efek urutan kedua dari kondisi gangguan, yang
saat ini digunakan untuk diagnosis gearbox.
- Pemantauan getaran: ini adalah
metode khas untuk diagnosis kesalahan dalam aplikasi industri; itu mencapai hasil yang baik untuk analisis bantalan,
tetapi menyajikan beberapa kekurangan dengan kesalahan listrik dan rotor
[ 5 , 6 ].
- Analisis kimia: ini digunakan
untuk menganalisis bantalan grease; hanya
digunakan dengan motor besar dan tidak dengan motor kecil yang lebih khas.
- Pengukuran kebisingan akustik:
ini adalah tren baru di bidang deteksi kegagalan gearbox.
- Analisis tanda tangan motor saat
ini (MCSA), yang dijelaskan lebih lanjut di bawah ini.
- Kecerdasan buatan berbasis model
dan teknik berbasis jaringan saraf. Ini
adalah pendekatan baru yang menggabungkan akuisisi data multi-modal dan
teknik pemrosesan sinyal canggih yang diperkenalkan oleh Nandi et al. [ 7 ].
Karya
ini bukan merupakan upaya untuk mengembangkan diagnosis kesalahan untuk semua
metode yang diakui, tetapi berfokus pada analisis teknik analisis tanda tangan
motor saat ini (MCSA). Teknik ini telah dipilih untuk pengakuannya sebagai standar
industri dan sebagai teknik non-invasif. Dasar
dari teknik ini dikenal luas dan telah diperkenalkan oleh beberapa penulis. Di antara mereka, Toliyat et al. [ 7 , 8 ], Benbouzid et al. [ 9 , 10 ], dan Thomson [ 11 , 12 ] adalah yang paling relevan di lapangan, meskipun
banyak yang lain [ 13-20 ] juga berkontribusi terhadap kemajuan ilmiah di
bidang ini.
Publikasi
ini memperkenalkan dasar operasi MCSA, yang juga merupakan dasar dari proyek
penelitian ini.Banyak penulis berurusan dengan kesalahan mekanis, terutama
dengan efek patah rotor bar dan eksentrisitas. Thomson, bagaimanapun,
berfokus pada diagnosis kesalahan stator dan menyajikan hasil dan argumen yang
baik. Karya-karya ini adalah pengantar yang
baik untuk teknik pemantauan kondisi MCSA dan memberikan gambaran yang jelas
tentang analisis kesalahan pada mesin induksi untuk operasi steady-state.
Catu
daya pada mesin induksi menciptakan medan magnet berputar pada armature. Medan magnet yang berputar
menginduksi tegangan dan arus rotor pada frekuensi slip, dan ini menghasilkan
medan magnet tiga fase yang efektif berputar pada frekuensi slip sehubungan
dengan rotor. Dua kasus berbeda muncul:
- Belitan sangkar simetris ⇒ hanya bidang putar depan
yang diproduksi.
- Rotor asimetris ⇒ bidang berputar ke belakang
akan menghasilkan frekuensi slip sehubungan dengan rotor.
Medan
putar mundur ini menginduksi tegangan pada stator pada frekuensi yang sesuai,
dan menghasilkan arus terkait yang memodifikasi spektrum arus-stator. Medan putar yang berbeda
muncul dengan gangguan yang berbeda pada mesin induksi, seperti eksentrisitas
celah udara, batang rotor yang rusak, kerusakan bantalan, dan korsleting pada
belitan stator. Frekuensi saat ini yang
terkait dengan bidang rotasi dinyatakan oleh Persamaan (1 - 4) :
Unknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown
node type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: span
(1)
di mana m = 1,2,3, ... adalah bilangan bulat positif, p adalah jumlah pasangan
kutub, s adalah slip per-unit,
dan f s adalah frekuensi pasokan
listrik.
Unknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: span
(2)
di mana l / p = 1,5,7,11,13, ... adalah nilai karakteristik
motor.
Unknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: span
(3)
di
mana n b adalah jumlah bola bantalan, f i , 0 adalah frekuensi getaran karakteristik, f r adalah kecepatan rotor mekanik dalam Hz, b d adalah diameter bola, p d adalah diameter pitch bantalan, dan β adalah
sudut kontak bola dengan ras.
Persamaan (3) menunjukkan getaran frekuensi motor dengan bantalan
patah; Namun
harmonik ini tidak dapat dengan mudah dihargai pada arus. Bahkan, kasus kerusakan bantalan menyebabkan eksentrisitas
rotor, dan lebih jauh penampilan eksentrisitas pada rotor atau bahkan pada
beban akan menyebabkan kerusakan bantalan lebih lanjut. Untuk alasan ini, kita juga dapat menggunakan Persamaan (1) untuk mendeteksi masalah bantalan.
(d)
Korsleting
- d. (1) frekuensi menengah
Unknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: span
(4)
- d. (2) frekuensi rendah
Unknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: span
(5)
di
mana Z 2 adalah jumlah slot rotor atau batang rotor dan k =
0,1,3,5, ...
Ekspresi
(4) menunjukkan komponen yang dihasilkan oleh putaran pendek dalam gelombang
fluks celah udara, dan karenanya arus stator sebagai fungsi slot rotor, di
sekitar harmonik orde menengah, sedangkan Ekspresi (5) menunjukkan harmonik
yang dihasilkan oleh gangguan. sekitar frekuensi dasar f s . Namun, frekuensi yang ditunjukkan oleh (5) juga muncul dalam
kasus ketidakseimbangan rotor, termasuk eksentrisitas, ketidaksejajaran
rotor, dll. Oleh karena itu, (4) sering
digunakan untuk mendeteksi kesalahan, dan (5) digunakan untuk memastikan asal
dalam korsleting berliku di stator berliku.
Gambar 2 menggambarkan spektrum arus
stator dari mesin induksi. Frekuensi harmonik yang dihasilkan oleh kesalahan jelas
ditampilkan pada 25 Hz, 75 Hz, 125 Hz dan 175 Hz, seperti yang diharapkan dari
(1).Gambar 3 menggambarkan spektrum arus
stator untuk beban konstan motor induksi dengan batang patah, seperenam dari
total dalam kasus ini. Seperti yang diharapkan, harmonik penting muncul di sideband
bawah frekuensi utama.

Spektrum arus stator motor induksi
dengan eksentrisitas tinggi pada beban nominal.

Stator saat ini spektrum motor induksi
dengan delapan batang patah.
Efek
gangguan listrik pada mesin induksi jelas diperkenalkan oleh Thomson [ 11 , 12 ], sementara beberapa penulis lain [ 17 , 18 ] bekerja dengan pemantauan saat ini tanpa analisis
spektral. Dalam
kasus kesalahan stator, analisis spektral mungkin tidak diperlukan. Namun, perlu dipertimbangkan jika kami bertujuan untuk solusi
global untuk diagnosis kesalahan mesin induksi.
Setelah
memperoleh pengetahuan tentang perilaku motorik di bawah kondisi yang sehat dan
rusak dan hubungannya dengan distribusi harmonik, studi yang lebih dalam untuk
meningkatkan deteksi kesalahan dapat dilakukan. Seperti dijelaskan
sebelumnya, MCSA adalah teknik deteksi kesalahan yang baik, yang telah mencapai
hasil yang baik dalam banyak kasus. Namun,
kelemahannya tidak memungkinkan solusi global untuk teknik pemantauan kondisi
online atau pengembangan alat diagnostik.
Kelemahan
utama terkait dengan fakta bahwa mesin induksi tidak beroperasi dengan torsi
rendah yang konstan dan pada kecepatan konstan. Mesin induksi menjadi semakin
populer, terutama sejak drive inverter muncul di pasaran. Saat ini, motor sangkar tupai mencakup sebagian besar
aplikasi industri dan domestik dan merupakan cara paling penting untuk mengubah
energi listrik menjadi energi mekanik. Motor
ini bekerja dengan berbagai jenis aplikasi dengan beban konstan dan variabel,
dan pada kecepatan konstan dan variabel. Selain
itu, inverter memperkenalkan kelemahan tambahan pada motor, seperti voltase
mode umum, dv / dt , dan harmonisa tambahan. Solusi global diperlukan dan
mesin induksi di berbagai posisi operasi harus dipelajari lebih lanjut. Tujuan utama dari pekerjaan ini adalah untuk mengembangkan
teknik pendeteksian kesalahan baru untuk kondisi operasi apa pun.
Berbagai
solusi telah diperkenalkan untuk meminimalkan masalah yang terkait dengan
identifikasi kesalahan yang tepat dalam kondisi beban non-standar. Beberapa didasarkan pada
pengukuran fluks pada gigi stator [ 21 ], atau dengan melakukan analisis statistik tingkat
tinggi [ 22 ].
Tren
penting dalam deteksi kesalahan adalah injeksi tes frekuensi tambahan dan
pengembangan alat baru berdasarkan teknik pemrosesan sinyal yang ditingkatkan,
seperti Wavelet Transform atau konversi dq0.Pengenalan pertama injeksi sinyal
dapat ditemukan dalam standar EN 61986-2002 yang digunakan untuk evaluasi
insulasi motor. Pada tahun 1998 Ho dan Cheng [ 23 ] memperkenalkan injeksi sinyal frekuensi rendah pada
mesin yang salah, yang terbukti menjadi pendekatan yang baik dengan beberapa
hasil yang sangat menarik. Namun ini masih jauh dari solusi penuh, karena gagal
memperhitungkan efek injeksi sinyal, seperti komposisi antara harmonik yang
disuntikkan dan fundamental.
Dalam
sebuah makalah yang diterbitkan pada tahun 2004 [ 24 ], Henao, Capolino et al . mengembangkan gagasan deteksi
kesalahan mekanis dengan menyuntikkan berbagai sinyal eksitasi, seperti diskrit
interval binary (DIBS) dan multisine, dengan maksud mode menarik yang menarik
dengan resolusi frekuensi rendah dan menganalisis arus stator dan fluks yang
tersesat yang diukur oleh suatu sensor fluks eksternal.Pekerjaan ini, terlepas
dari didasarkan pada analisis flux liar, menawarkan pendekatan yang menarik
untuk perilaku motorik salah yang tereksitasi oleh sinyal injeksi yang berbeda.
Dua artikel yang diterbitkan pada 2003 dan 2004 [ 25 , 26 ], oleh Briz dan rekan kerja, menggunakan injeksi
frekuensi tinggi sebagai metode pendeteksian kesalahan belitan pada kertas
pertama, dan kesalahan rotor pada artikel kedua. Pengukuran arus sinyal
pembawa urutan negatif, dengan menggunakan tegangan frekuensi tinggi
berkekuatan rendah yang ditumpangkan oleh tegangan eksitasi fundamental,
terbukti dapat mendeteksi kesalahan pada belitan stator dan sangkar rotor
(batang rotor yang rusak) pada tahap awal. , terlepas dari kondisi kerja mesin. Ini juga merupakan pendekatan yang menarik, yang telah kami
pertimbangkan dalam pekerjaan kami, meskipun efek komposisi sinyal belum
diperhitungkan. Karya-karya ini [ 24 - 26 ] menunjukkan injeksi sinyal tambahan sebagai teknik
yang baik untuk deteksi kesalahan.Namun, efek komposisi frekuensi dan perilaku
di bawah frekuensi ganda (disuntikkan plus fundamental) tidak ditunjukkan
dengan jelas. Mata pelajaran ini dikembangkan, dan didukung oleh analisis
teoretis, simulasi, dan hasil eksperimen. Seperti
yang sudah diperkenalkan, injeksi dapat menjadi metode yang baik untuk
menganalisis motor yang digerakkan oleh power inverter, yang dapat menerapkan
rutin diagnostik.
2.
Pendekatan yang Diusulkan
Karena efek induksi kami berharap untuk melihat frekuensi
utama dan frekuensi tambahan yang disuntikkan dalam spektrum. Namun, sebagai kontribusi
dari inti magnetik dan histeresis besi, dan juga karena non-linearitas umum
dari motor induksi, komposisi tambahan muncul, ditentukan oleh persamaan
berikut:
f c = n ⋅ f s + m ⋅ f i
(6)
di
mana n = m =
...− 2, −1, 0, 1, 2,…, dan f c > 0.
Adalah
mungkin untuk menentukan efek dari bar rotor yang rusak dalam spektrum arus
motor dengan mempelajari komposisi fluks dalam stator dan komposisi mekanik
frekuensi sebagai komposisi kecepatan.Di stator ada medan magnet yang berbeda
karena injeksi sinyal yang berbeda. Jika bidang yang berbeda dianggap sebagai roda yang berbeda
bergerak di sekitar diri mereka dengan kecepatan sudut yang berbeda, kecepatan
relatif di antara mereka akan menjadi jelas.
Untuk
menentukan tanda yang berbeda ini, penting untuk mempelajari komposisi
frekuensi yang berbeda, medan magnet yang berbeda yang diinduksi dalam mesin,
dan kecepatan relatif di antara mereka. Dalam (7) kita akan mempertimbangkan kecepatan rotasi motor
untuk:
Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: span
Batang
atau cincin yang patah, patah pada sangkar tupai, dan kesalahan lain pada rotor
akan menyebabkan medan yang berdenyut, yang dapat dilihat sebagai dua bidang
rotasi yang berputar pada frekuensi slip:
f rotasi = ± sf s
(8)
Dari
sudut pandang belitan stator, komponen belakang dari kegagalan rotor bar
terlihat pada frekuensi (- sf s + lf r ), di mana l adalah fungsi pasangan kutub. Ini berarti:
Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: span
(9)
sesuai
dengan frekuensi bar rotor yang rusak di sideband kiri. Perhatikan bahwa komponen
maju dari bidang berputar di rotor tidak menghasilkan harmonik baru dalam
spektrum stator.
Jika
sinyal uji tiga fase disuntikkan ke stator pada frekuensi f i , komponen rotasi baru diproduksi lagi di rotor pada
frekuensi ± (f i - f c - f r ) , di mana f c adalah frekuensi komposisi baru seperti ( 6). Bidang gambar berputar yang
diproduksi di stator terlihat pada ± (f c - f r ) ±
f r . Ekspresi umum dapat diperoleh
yang mencakup semua harmonik frekuensi utama dan yang disuntikkan:
f bb_back_inj = ± n f s ± m f i - 2 j sf s
(10)
di
mana j = 1, 3, 4, 6, ..
Komponen
frekuensi yang salah yang muncul di stator tidak hanya karena sinyal yang
diinjeksikan, tetapi juga karena frekuensi yang dikomposisikan ditentukan oleh
(6). Komponen
harmonik yang dihasilkan oleh kegagalan rotor diharapkan dapat ditemukan di
sekitar harmonik yang tersusun dan sesuai dari frekuensi baru ini.
Motor
dapat dianggap sebagai filter low-pass dengan frekuensi tiang 400 Hz. Karena frekuensi yang
disuntikkan yang berbeda akan menghasilkan komposisi yang berbeda, sinyal yang
disuntikkan harus dipilih untuk mendapatkan frekuensi yang dikomposisikan
antara empat kali fs dan 400 Hz. Dengan cara ini, bandwidth
optimal di-windowed untuk menganalisis spektrum arus stator tanpa mempengaruhi
operasi motor.
Solusi utama (dan kadang-kadang satu-satunya) ketika motor
gagal adalah untuk memperbaikinya atau untuk menggantinya. Sebaliknya, pendekatan yang
disajikan memungkinkan pengaturan pengawasan permanen dan tindakan pemeliharaan
prediktif pada motor dan rantai terkait. Cara
untuk menerapkan uji injeksi frekuensi sesederhana menyuntikkan komponen
frekuensi dari sumber inverter dan menganalisis pita frekuensi di sekitar
harmonisa baru yang muncul pada arus stator.
3. Analisis
Simulasi
Tujuan dari pemodelan sebelumnya adalah untuk memperkirakan
variasi impedansi karena kesalahan.Model parametrik khas untuk mesin induksi
disajikan dalam Persamaan (11) , (12) dan (13) . Mereka menyatakan hubungan tegangan antara rotor dan stator
(11), torsi (12), dan persamaan posisi kecepatan dan rotor (13) .
Unknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: span
(11)
Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: span
(12)
Unknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown
node type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: span
(13)
3.1. Misalignment rotor
Misalignment rotor dapat dinyatakan sebagai variasi pada
induktansi timbal balik antara belitan rotor dan stator. Variasi ini pulsa pada
frekuensi sf mengacu pada bidang stator.
Ini berarti variasi pada induktansi bersama dari:
Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: span
(14)
Memberikan
ekspresi induktansi terakhir:
Unknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown
node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: span
(15)
3.2. Batang Rotor Putus
Insiden patah rotor bar (BRB) harus muncul terutama sebagai
variasi pada resistensi rotor. Bahkan, insiden BRB menghasilkan perubahan pada resistensi
rotor dan induktansi. Namun, untuk batang
rotor yang rusak, variasi hambatan dalam satu fase rotor memungkinkan hasil
yang tepat dapat dicapai. Tingkat kesalahan
aktual tergantung pada jumlah batang yang dimiliki kandang rotor, jumlah batang
patah yang bersebelahan, dan kerusakan pada batang yang mengalami degradasi. Karena Rra adalah resistansi setara dari batang rotor n / 3
paralel, jika semua kecuali satu batang rotor sehat maka hubungan dapat
diperoleh dengan Persamaan berikut (16) :
Unknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: span/Unknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: span/Unknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: span/Unknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: span/Unknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: span
(16)
Misalnya,
untuk 12 bar dalam sangkar rotor, peningkatan Rra dengan faktor 1,328 ( yaitu ,
α = 1,328 di atas dan R'ra = 1,328 · Rra) akan berarti bahwa resistansi satu
batang rotor telah meningkat sebesar faktor 83 (k = 83), jika batang lainnya
tidak rusak. Jika ada bar rusak yang berdekatan dan dua bar di sebelahnya
dengan kerusakan yang sama k, maka hubungan R'ra / Rra adalah:
Unknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: span/Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: span/Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: span/Unknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: span/Unknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: span
(17)
Selanjutnya,
pertukaran resistensi akan menjadi variasi induktansi yang terjadi pada
misalignment, daripada variasi induktansi timbal balik muncul sebagai variasi
dalam induktansi fase diri L, karena variasi dalam jumlah bar rotor dan variasi
dalam induktansi bersama, M (antara rotor dan stator) karena pertukaran
keengganan. Variasi pada R, L dan M akan berdenyut pada kecepatan relatif
rotor, dan mengacu pada fluks putar stator, denyutan ini adalah sf s , memberikan:
Dalam
kasus resistensi rotor:
Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: span
(18)
Dalam
kasus induktansi diri rotor:
Unknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown
node type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: span
(19)
Untuk
versi κ , persamaan ekivalen dapat
digunakan seperti yang diberikan untuk α dalam
kasus resistansi rotor, tergantung pada jumlah bar rotor n, dan tingkat
kerusakan pada bar rotor k:
Unknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: span
(20)
Saling
induktansi harus memenuhi ekspresi yang sama (14) seperti dalam kasus
eksentrisitas.
Variasi ini akan memberikan substitusi persamaan pada
persamaan motor fundamental, yang untuk kasus bar rotor rusak memberikan:
Unknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type:
spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: span
(21)
Unknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type:
spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node type: spanUnknown node
type: spanUnknown node type: spanUnknown node type: span
(22)
3.3. Implementasi Model Motor Simulink
Sistem persamaan parametrik yang baru saja disajikan telah
diterapkan pada Simulink, dengan blok yang berbeda berisi persamaan diferensial
untuk fase stator dan rotor, torsi dan persamaan kecepatan diferensial.Dalam
persamaan diferensial untuk parameter variabel fase stator dan rotor telah
diperkenalkan, yang mewakili kondisi kesalahan. Tiga blok tambahan telah
ditambahkan ke model utama yang dikembangkan di Bagian 3 untuk memperkenalkan
frekuensi tambahan pada pasokan stator. Gambar 4 berikut menunjukkan komposisi
harmonik yang diharapkan pada arus stator karena injeksi, dan penampilan
harmonik yang salah pada uji frekuensi dan harmonik tersusun tambahan.

Injeksi yang diterapkan pada model
parametrik.
Frekuensi
yang dikomposisikan hanya muncul dalam kasus misalignment motor, meningkat
dalam amplitudo dengan peningkatan kondisi gangguan. Gambar 5 menunjukkan distribusi
harmonik yang diharapkan.

Injeksi 125 Hz tanpa beban; disuntikkan
dan disusun distribusi harmonik.
Gambar 6 ,, 77 dan dan 8 8 menunjukkan bagaimana
harmonik muncul karena kondisi kesalahan di sekitar harmonik yang disuntikkan
dan disusun.

Detail 175 Hz untuk frekuensi injeksi
125 Hz dengan torsi rendah. Ini menunjukkan kondisi kesalahan
BRB.

Uji frekuensi injeksi 125 Hz, beban
rendah.

Injeksi 125 Hz, beban rendah. Detail
Gambar 9 dan and10 menunjukkan perbandingan
antara frekuensi komposit yang berbeda; frekuensi komposit hanya muncul dalam kasus kondisi gangguan,
yang menyiratkan parameter estimasi kesalahan yang baik untuk motor yang
beroperasi tanpa beban.

Frekuensi komposit 2 Fs + Fi.

Frekuensi komposit Fs + 2 Fi.
Harmonik tersusun frekuensi rendah menyebabkan osilasi torsi,
yang membingungkan untuk hasil simulasi. Gambar 11 menunjukkan harmonik yang
dikompensikan frekuensi pada frekuensi rendah, lebih rendah dari pasokan
frekuensi. Variasi dalam amplitudo dalam beberapa harmonisa dapat
dihargai, karena kondisi gangguan dan osilasi torsi selama startup. Harmoni ini karenanya dapat digunakan untuk mendapatkan hasil
yang baik dalam deteksi kesalahan.

Frekuensi gabungan 2 Fs – Fi.
3.4. Pengaruh Arus Suntikan
Untuk mempertimbangkan efek saturasi pada lembar rotor,
bidang yang diinduksi telah disimulasikan dengan menggunakan perangkat lunak
FEM. Tes
frekuensi injeksi yang berbeda akan menghasilkan efek yang berbeda pada motor; beberapa makalah [ 8 ] memperkenalkan teori injeksi untuk motor kontrol
tanpa sensor. Referensi ini berbicara tentang motor sebagai band-pass. Untuk memastikan hal ini, dimungkinkan untuk mensimulasikan
kerapatan fluks arus dan medan pada sangkar stator dan tupai, menggunakan
simulator dengan benar, memperkenalkan desain rotor dan stator dan
memperkenalkan uji frekuensi yang ditemukan pada Gambar 12 (kerapatan aliran arus untuk
50 Frekuensi Hz) dan pada Gambar 13 (kerapatan aliran arus untuk
frekuensi 200 Hz) untuk amplitudo tegangan yang sama.

Kerapatan fluks untuk frekuensi 50 Hz.

Kerapatan fluks untuk frekuensi 200 Hz.
Dengan
melihat pada dua angka terakhir kita dapat melihat bahwa untuk uji frekuensi
200 Hz ada kerapatan arus yang lebih besar, yang mengkonfirmasi gagasan bahwa
motor dapat dianggap sebagai jalur-band dengan frekuensi sentral 200 band. Untuk melakukan ini, kami
akan mencoba menyuntikkan uji frekuensi kami sedekat mungkin ke 200 Hz.
Mengenai efek saturasi, analisis FEM menunjukkan distribusi
fluks pada lembaran motor agar serupa dengan frekuensi yang disuntikkan yang
sedang dianalisis. Oleh karena itu, menyuntikkan uji frekuensi arus rendah tidak
menghasilkan saturasi pada lembaran motor.
4. Prosedur
Eksperimental
4.1. Pengaturan Eksperimental Test Rig
Motor induksi tiga fase, 1,1 kW, 380 V dan 2,6 A, 50 Hz,
1,410 rpm, empat-kutub digunakan dalam penelitian ini. Pertama-tama, kinerjanya yang
sehat dianalisis dan, setelah itu, seperenam batang rotor rusak. Arus telah diukur dengan probe arus A622 Tektronix, 100
Ampere AC / DC. Rentang saat ini adalah
0/100 mV / A, dan akurasi DC tipikal adalah ± 3% ± 50 mA pada 100 mV / A (50 mA
hingga puncak 10 A). Rentang frekuensi
beralih dari DC ke 100 kHz (−3 dB).
4.2. Persyaratan Akuisisi Sinyal
Tegangan uji bantu disuntikkan pada frekuensi 80 Hz, 125,5
Hz, 176 Hz, dan 200 Hz, dan amplitudo masing-masing 29 V, 36 V, 43 V, dan 46.5
V. Untuk
menyuntikkan frekuensi uji, berbagai opsi telah diuji, termasuk penggunaan
mesin sinkron untuk mencapai pasokan tambahan sinusoidal lengkap. Saat ini, inverter frekuensi AC digunakan yang mampu
menyuntikkan tegangan uji tambahan dari 0 Hz hingga 400 Hz dan dari 0 hingga
250 VAC.
Frekuensi
sideband diperiksa sekitar beberapa harmonisa arus baru yang diperoleh pada
(10), terutama:
f c 1 = −2 f s + f i , f c 2 = 2 f s + f i , f c 3 = f s + 2 f i
di
mana f ci adalah frekuensi yang dikomposisikan ( Tabel 1 ). Harmonik gangguan baru
diharapkan pada frekuensi yang disediakan oleh (10).
Tabel 1.
Frekuensi
Suntikan dan Susun.
Frekuensi Pasokan
( f s ) = 50 Hz
|
|||
Frekuensi Injeksi
( f i ) Hz
|
f c1 = - 2f s + f i Hz
|
f c2 = 2f s + f i Hz
|
f c3 = f s + 2f i Hz
|
79.9
|
−20.1
|
179.9
|
209.8
|
125.5
|
25.5
|
225.5
|
301
|
175.8
|
75.8
|
275.8
|
401.6
|
200
|
100
|
300
|
450
|
Beberapa
tes telah dilakukan dengan mempertimbangkan hal tersebut di atas. Ini memvalidasi gagasan menggunakan
sinyal uji tegangan tambahan dan menganalisis harmonisa sideband untuk
mendeteksi motor induksi yang rusak.
Beban
disesuaikan dengan menggunakan motor DC yang bekerja sebagai generator dan
dengan memasok satu set resistor. Motor dilengkapi dengan 220 VAC, koneksi bintang. Ini berarti 150 V AC per fase, yang mengarah ke kecepatan
lebih rendah dari nominal (1.275 rpm), dan frekuensi selip lebih tinggi dari
nilai nominal (sekitar 15%). Menggunakan
koneksi ini tidak mempengaruhi kesimpulan utama dari makalah ini, meskipun
hasilnya ditunjukkan dengan cara yang jauh lebih jelas.
Gambar 14 dan 1515 menunjukkan spektrum MCSA
standar di sekitar frekuensi utama 50 Hz, baik untuk motor yang sehat dan
rusak, dan untuk setiap frekuensi yang diinjeksi. Rotor berjalan pada 1.275
rpm, dan frekuensi yang salah untuk batang rotor yang rusak ditunjukkan pada 15
Hz dari frekuensi pembangkit, kira-kira ( Gambar 14 ). Rasio antara harmonik karena kesalahan dan harmonik utama
lebih rendah dari 1%. Hasil ini setuju
dengan yang diharapkan dari penerapan metode MCSA klasik.

Spektrum arus stator untuk motor yang
sehat dengan beban.

Spektrum arus stator untuk motor yang
rusak dengan beban.
Spektrum
saat ini di sekitar fc1, fc2, dan fc3 untuk setiap frekuensi yang disuntikkan,
untuk motor yang sehat, ditunjukkan pada Gambar 16 ,, 1717 dan and18. 18 . Untuk menunjukkan efek dari setiap frekuensi yang lebih baik,
frekuensi komposisi dipusatkan pada 0 Hz dan frekuensi kesalahan yang
dihasilkan terletak di sekitar posisi sentral ini.

Spektrum arus stator sekitar fc1 untuk
motor yang sehat.

Stator spektrum arus sekitar fc2 untuk
motor yang sehat.

Stator spektrum arus sekitar fc3 untuk
motor yang sehat.
Seperti
yang diharapkan, komposisi frekuensi fc1 memiliki amplitudo lebih tinggi
daripada fc2 dan fc3 pada motor yang sehat, karena mereka berada pada jarak
yang lebih besar dari kutub filter motor low-pass.
Gambar 19 ,, 20, dan and21 menunjukkan spektrum saat ini
di sekitar fc1, fc2, dan fc3 untuk setiap frekuensi yang diinjeksikan ke motor
yang rusak. Seperti yang diharapkan, komponen spektrum arus yang sesuai
karena gangguan adalah −15 Hz di setiap gambar. Namun, spektrum sekitar fc1 memiliki banyak harmonisa yang
berbeda, yang membuatnya sulit untuk mengidentifikasi kesalahan. Ini karena frekuensi terpusat adalah 25,5 Hz, 76 Hz dan 100
Hz, dan sideband berada di kisaran 5 Hz hingga 120 Hz. Dalam kisaran inilah kita dapat menemukan sebagian besar
harmonisa di mesin nyata: eksentrik rotor, ketidakseimbangan fluks, dan
guncangan mekanis, di antaranya. Di sisi
lain, Gambar 20 dan Gambar 21 menunjukkan spektrum yang
lebih jelas, walaupun amplitudo harmonik lebih rendah di sekitar fc3 karena
mereka dekat dengan frekuensi cut-off dari filter motor low-pass.

Spektrum arus stator di sekitar fc1
untuk motor yang rusak.

Spektrum arus stator di sekitar fc2 untuk
motor yang rusak.

Spektrum arus stator di sekitar fc3
untuk motor yang rusak.
Meskipun
amplitudo komponen gangguan baru ini cukup berkurang, rasio 10% yang ditemukan
antara frekuensi gangguan dan frekuensi pembangkitan lebih tinggi daripada
rasio 1% yang dihitung untuk komponen standar yang digunakan dalam MCSA klasik
( Gambar 12 ).
Frekuensi
pembangkitan pada Gambar 19 memiliki urutan yang sama
dengan frekuensi utama. Ini berarti bahwa sinyal uji memengaruhi operasi motor, untuk
kemudian mengubah slip. Fakta ini,
dikombinasikan dengan spektrum yang tidak jelas, membuat komposisi frekuensi
rendah fc1 tidak cocok untuk mendeteksi kesalahan rotor.
Gambar 20 dan Gambar 21 menunjukkan frekuensi yang
salah persis dengan nilai yang diharapkan.Namun, frekuensi pembangkit terlalu
besar dalam kasus fc3 dan harmonik yang dihasilkan terlalu kecil dan sulit
untuk diukur dan dianalisis. Sebaliknya, Gambar 20 menunjukkan tidak hanya
hubungan yang sangat baik antara frekuensi menghasilkan dan menghasilkan
sekitar 11%, tetapi juga amplitudo harmonik gangguan 2 e-3A, yang cukup untuk
diperoleh dan dianalisis. Oleh karena itu, metode yang diusulkan terdiri dari menangkap
dan menganalisis komponen-komponen spektral arus baru ini yang muncul karena
komposisi sinyal antara frekuensi utama dan frekuensi yang disuntikkan.
Beberapa
harmonisa yang relatif penting muncul dalam spektrum untuk mesin yang sehat dan
rusak.Misalnya, Gambar 17 dan Gambar 20 menunjukkan komponen
frekuensi −10 Hz 1,5e-3 A untuk Fi = 80 Hz, yang sesuai dengan 170 Hz dalam
spektrum arus stator. Komponen ini, yang tidak terkait langsung dengan kesalahan,
disebabkan oleh komposisi frekuensi (5Fs-Fi). Penjelasan serupa dapat ditawarkan untuk komponen frekuensi
+10 Hz dari 2e-3 A pada Gambar 18 dan and21,21 , yang disebabkan oleh komposisi frekuensi (3Fs-Fi). Dalam hal ini, komponen stator
yang sebenarnya adalah 220 Hz. Jelas, semua
frekuensi ini yang disebabkan oleh komposisi frekuensi yang diberikan oleh (10)
tidak boleh dipertimbangkan untuk analisis kesalahan.
Amplitudo
frekuensi senyawa fci dalam spektrum arus stator ditunjukkan pada Gambar 22 . Dari gambar tersebut, dapat
disimpulkan bahwa besarnya fc1 pada motor yang sehat lebih besar daripada pada
motor yang rusak. Namun, besarnya fc2 dan
fc3 pada motor yang sehat lebih kecil dari pada motor yang rusak.

Amplitudo stator menyusun frekuensi.
Kesimpulan
ini berlaku untuk setiap frekuensi yang disuntikkan. Dengan demikian, komposisi
spesifik fc2 dan fc3 juga dapat digunakan untuk mendeteksi kegagalan rotor,
karena amplitudo mereka, untuk setiap frekuensi yang disuntikkan, jelas lebih
tinggi pada motor yang rusak.
Untuk
mendeteksi kesalahan, sideband di sekitar frekuensi kesalahan yang diharapkan
dipantau untuk periode waktu setelah menerapkan frekuensi pengujian. Sistem diagnostik akan
mencari peningkatan amplitudo harmonik tertentu. Jika muncul, dan hubungan antara frekuensi pembangkitan fc2
dan frekuensi kesalahan lebih tinggi dari nilai yang telah ditentukan, maka
kesalahan akan terdeteksi. Dibandingkan
dengan metode MCSA standar, satu-satunya kelemahan adalah bahwa perlu untuk
menghasilkan dan menerapkan sinyal uji ke fase stator. Namun, generasi gelombang sinus 75-200 Hz bukan masalah bagi
modulator yang termasuk dalam setiap inverter frekuensi sekarang. Di sisi lain, pengukuran fase saat ini sudah digunakan dalam
metode MCSA, serta untuk tujuan kontrol.
Pemilihan
frekuensi sinyal uji merupakan pertukaran antara beberapa masalah. Frekuensi pembawa harus cukup
tinggi untuk menciptakan efek batang dalam yang mencegah gelombang fluks
frekuensi tinggi secara substansial menghubungkan ke batang rotor, tetapi juga
harus cukup rendah sehingga efek kulit pada laminasi rotor tidak mengusir fluks
dari. menembus di bawah permukaan rotor.
Dalam
kasus praktis, model filter low-pass dari mesin dapat diusulkan, dengan
frekuensi kutub dalam 400 Hz. Oleh karena itu, interaksi antara frekuensi uji utama dan
sinyal harus menyebabkan komponen harmonik baru lebih rendah dari nilai ini
untuk mendapatkan hasil yang baik.
Dalam
kasus kondisi kesalahan baru jadi penampilan harmonik kesalahan dan harmonik
terdiri tetap.Namun, amplitudo harmonik berhubungan langsung dengan kondisi
gangguan. pengujian
lain juga telah dilakukan dengan pasokan inverter dan kondisi kesalahan rendah
1 dan 2 BRB. Berikut ini ditampilkan dan
hasil pengujian utama dibahas
- Pasokan Utama, Vphase = 230 Vrms
f = 50 Hz
- Tegangan uji, Vphase = 20 Vrms
f 1 =
80 Hz, f 2 = 125 Hz;
Gambar 23 menunjukkan kondisi gangguan
dan komposisi mematikan sinyal pada spektrum.

Pita Spektrum Saat Ini untuk 1 motor
BRB.
4.3. Sebutkan untuk Pasokan Konverter VVVF
Meskipun tegangan yang diinjeksikan diperoleh dari
generator bantu melalui transformator serial, tidak ada masalah untuk
menghasilkan gelombang sinus tiga fase yang dikomposisikan dengan frekuensi uji
yang diinginkan dengan menggunakan referensi modulasi khusus dalam blok
Modulasi Ruang Vektor dari power inverter. Untuk implementasi praktis dalam peralatan
industri, sinyal uji frekuensi harus lebih tinggi dari bandwidth loop saat ini,
terutama ketika kontrol vektor diterapkan pada IM. Dalam hal ini, pilihan sinyal uji frekuensi akan sama seperti
pada aplikasi sinusoidal, lebih atau kurang pada pita 80-200 Hz. Untuk memungkinkan subharmonik karena modulasi kami
memperkenalkan filter high-pass reaktansi antara drive dan konverter VVVF, yang
memotong subharmonik karena modulasi asinkron. Gambar 24 menunjukkan perbandingan
amplitudo antara harmonik yang dikomposisikan untuk 1 Broken Rotor Bar, 2 dan
4. Frekuensi yang disuntikkan yang dipilih adalah yang paling menjanjikan untuk
deteksi kesalahan (80 Hz dan 125 Hz).

Perbandingan amplitudo stator menyusun
frekuensi untuk kondisi gangguan yang berbeda.
5.
Kesimpulan
Suntikan sinyal memastikan hasil yang tepat dalam
mendeteksi kesalahan, terutama dalam kasus torsi rendah. Penggunaan frekuensi yang
disuntikkan berlawanan arah jarum jam memperkenalkan slip tambahan pada motor
yang memungkinkan deteksi kesalahan dengan resolusi dinamis yang lebih
baik.Selain itu, frekuensi yang dikomposisikan adalah indikator yang baik dari
perilaku kesalahan mesin. Telah jelas
ditunjukkan bahwa dalam kasus kondisi gangguan beberapa frekuensi yang
dikomposisikan ini meningkatkan nilainya, yang menyiratkan ketidakseimbangan
dalam mesin yang dapat dipahami sebagai kondisi gangguan.
Namun,
frekuensi yang dikomposisikan hanya memperkenalkan gagasan ketidakseimbangan,
tetapi mereka tidak dapat membedakan antara misilignment rotor dan kondisi
kesalahan BRB, untuk mendapatkan diagnosis yang tepat. Kondisi gangguan dapat
dibedakan dengan menganalisis distribusi spektral saat ini tentang harmonik
yang disuntikkan dan disusun, tetapi lokasi harmonik yang salah bergantung pada
nilai slip, yang berarti bahwa dalam kasus beban variabel kondisi gangguan
tidak dapat dengan jelas dihargai.
Sebagai kesimpulan, adalah mungkin untuk menetapkan bahwa:
- - Teknik injeksi sinyal adalah
metode yang baik untuk deteksi kesalahan di bawah beban rendah, melalui
pemeriksaan harmonisa kesalahan pada sinyal yang diinjeksi dan komposisi
frekuensi.
- - Teknik injeksi sinyal adalah
penaksir yang baik dari kondisi ketidakseimbangan, melalui pemeriksaan
amplitudo frekuensi yang dikomposisikan.
- - Dalam hal beban variabel,
frekuensi yang dikomposisikan harus memastikan ketidakseimbangan, tetapi
perbaikan akan diperlukan di bidang pemrosesan sinyal untuk membedakan
kondisi gangguan.
Ucapan
Terima Kasih
Para
penulis ingin mengakui dukungan keuangan yang diterima dari Ministerio de Ciencia
y Tecnología de España (Kementerian Sains dan Teknologi Spanyol) untuk
melaksanakan pekerjaan ini, di bawah Proyek Penelitian TRA2010-21598-C02-01.
Referensi
1. Cabanas MF, Melero MG, Orcajo GA, Cano JM, Solares J. Técnicas para el Mantenimiento, dan
diagnosa de Máquinas Eléctricas Rotativas. Marcombo; Oviedo, Spanyol: 1996.
2. Meador D. Alat untuk O&M, dari Building Controls hingga
Thermal Imaging. Prosiding Workshop O&M untuk Manajer Fasilitas
Pemerintah; Washington, DC, AS. 19 Juni 2003.
3. Estimasi Parameter P. , Pemantauan Kondisi, dan Diagnosis
Mesin Listrik. Oxford University Press;New York, NY, AS: 1993.
4. Zidat F, Lecointe JP, F Morganti, Brudny JF, Jacq T,
Streiff F. Sensor Non Invasif untuk Memantau Efisiensi Mesin Perputaran Listrik
AC. Sensor. 2010; 10 : 7874–7895. [ Artikel gratis PMC ] [ PubMed ]
5. Wang HQ, Chen P. A Metode Ekstraksi Fitur Berdasarkan Teori
Informasi untuk Diagnosis Kesalahan Mesin Reciprocating. Sensor. 2009; 9 : 2415–2436. [ Artikel gratis PMC ] [ PubMed ]
6. Metode Gao LX, Ren ZQ, Tang WL, Wang HQ, Chen P.
Intelligent Gearbox Berdasarkan SVM, Mengangkat Wavelet dan RBR. Sensor. 2010; 10 : 4602–4621. [ Artikel gratis PMC ] [ PubMed ]
7. Nandi S, Toliyat HA. Pemantauan Kondisi dan Diagnosis Kesalahan Mesin
Listrik-A Review. IEEE Trans. Percakapan Energi. 1999; 10 : 1906–1915.
8. Nandi S, Toliyat HA, Li XD. Pemantauan Kondisi dan
Diagnosis Kesalahan Motor Listrik-A Review.IEEE
Trans. Percakapan Energi. 2005; 20 : 719-729.
9. Benbouzid MEH, Vieira M, Theys C. Induksi Motor Deteksi dan
Lokasi Menggunakan Teknik Stator Current Signal Processing. IEEE Trans. Daya Terpilih. 1999; 14 : 14–22.
10. Benbouzid MEH, Kliman GB. Apa Stator Teknik
Berbasis Pemrosesan Saat Ini untuk Digunakan untuk Diagnosis Kesalahan Motor
Rotor Induksi? IEEE Trans. Percakapan Energi. 2003; 18 : 238–244.
11. Thomson WT, Fenger M. Analisis Tanda Tangan Saat Ini untuk
Mendeteksi Kesalahan Motor Induksi.IEEE Trans. Aplikasi Ind. Mag. 2001; 15 : 26–34.
12. Thomson WT, Morrrison D. Diagnosis On-line Stator
Korsleting pada Induk dan Inverter Motor Induksi Tegangan Rendah. Prosiding Konferensi
Mesin dan Drive Elektronik IEEE Power; Bath, UK. 16–18
April 2002; hlm. 122–127.
13. Schoen RR, Habetler TG, Kamran F, Bartheld RG. Deteksi Kerusakan
Bantalan Motor Menggunakan Pemantauan Arus Stator. IEEE Trans. Aplikasi Ind. 1994; 26 : 114–116.
14. Korde A. Pemantauan Kondisi Online Motor Menggunakan
Analisis Tanda Tangan Listrik, Kemajuan Terbaru dalam Pemeliharaan Pabrik
Berbasis Kondisi. Seminar yang diselenggarakan oleh Insinyur Insinyur
Tanaman India; Mumbai, India. 17–18 Mei 2002.
15. Pengaruh Miletik A, Cettolo M. Frekuensi Konverter pada
Motor Induksi Deteksi Kesalahan Rotor Menggunakan Analisis Signature Motor Saat
Ini Penelitian Eksperimental. Prosiding Simposium pada Diagnostik untuk Mesin Listrik,
Power Elektronik dan Drive, SDEMPED; Atlanta,
GA, AS. 24–26 Agustus 2003; hlm. 124–128.
16. Alford T. Motor Analisis Saat Ini dan Penerapannya dalam Diagnosis
Kesalahan Motor Induksi.ENTEK IRD, Perusahaan Internasional; Milford, OH, USA: 1999.
hlm. 1–24.
17. Haylock A, Mecrow BC, Jack AG, Atkinson DJ. Deteksi On-line dari
Hubungan Pendek yang Berliku di Drive Fed Inverter. Prosiding Konferensi Internasional Kesembilan tentang
Mesin dan Drive Listrik;Canterbury, Inggris. 1–3 September 1999; hlm. 258–262.
18. Welchko BA, Jahns TM, Hiti S. IPM Mesin Sinkron Respons
Drive terhadap Kesalahan Sirkuit Terbuka Fase Tunggal. IEEE Trans. Daya Electro. 2002; 17 : 764–771.
19. Bellini A, Filippetti F, Franceschini G, Tassoni C,
Passaglia R, Saottini M, Tontini G, Giovannini M, Rossi A. Pengalaman di
Lapangan dengan Diagnosis Online Kegagalan Sangkar Motor Induksi Besar
Menggunakan MCSA. IEEE Trans. Aplikasi Ind. 2002; 38 : 1045–1053.
20. Henao H, Capolino GA, Razik H. Pendekatan Analitik
Komputasi Harmonika Frekuensi Saat Ini untuk Deteksi Kesalahan Rotor Mesin
Induksi. Prosiding Simposium pada Diagnostik untuk Mesin Listrik,
Power Elektronik dan Drive, SDEMPED; Atlanta,
GA, AS. 24–26 Agustus 2003; hlm. 259–264.
21. Cabanas MF, Pedrayes F, Ruiz M, MG Melero, Orcajo GA, Cano
JM, Rojas CH. Metode On-Line baru untuk Deteksi Dini Bar Rusak Rotor
di Motor Asinkron Bekerja di bawah Kondisi Beban Sewenang-wenang. Prosiding Simposium Aplikasi Industri IEEE, IAS 2005; Hong Kong, Cina. 2–5 Oktober 2005;hlm. 662-669.
22. Balal S, Khan ZJ, Suryawanshi HM, Sonolikar RL. Sistem Inferensi Fuzzy
Adaptif Neural untuk Deteksi Inter-Turn Insulasi dan Kesalahan Keausan Bantalan
pada Motor Induksi. IEEE Trans. Ind. Elektron. 2007; 54 : 189–199.
23. Ho SL, Cheng KWE. Pemantauan Kondisi Kesalahan Rotor di Motor Induksi
dengan Injeksi Sinyal Frekuensi Rendah ke Pasokan. Prosiding Power Electronics dan Drive Kecepatan
Variabel; Sorrento, Italia.21–23 September
1998; hlm. 200–205.
24. Demian C, Mpanda-M Zimbabwe A, Henao H, Capolino GA. Deteksi Mesin Induksi
Kesalahan Rotor pada Kemacetan Menggunakan Injeksi Sinyal. IEEE Trans. Aplikasi Ind. 2004; 40 : 1550–1559.
25. Briz F, Degner MW, Zamarrón A, Guerrero JM. Diagnosis Kesalahan
StatorWinding Online pada Mesin AC Inverter-Fed Menggunakan Injeksi Sinyal
Frekuensi Tinggi. IEEE Trans. Aplikasi Ind. 2003; 39: 1109-1117.
26. Briz F, Degner MW, Zamarrón A, Guerrero JM. Diagnostik Online di
Mesin AC Inverter-Fed Menggunakan Injeksi Sinyal Frekuensi Tinggi. IEEE Trans. Aplikasi Ind. 2004; 40 : 1109-1117.
Setengah Berpisah
Metode Half-Split (juga
dikenal sebagai Pendekatan Divide-and-Conquer )
umumnya digunakan oleh teknisi yang lebih berpengalaman. Teknisi akan menggunakan pengalaman mereka
untuk membuat tebakan yang mendidik tentang di mana letak kesalahannya, dan
kemudian maju atau mundur dalam sirkuit tertentu apakah itu. Pendekatan ini berfungsi untuk masalah teknis,
jaringan atau perangkat lunak.
Metode
ini adalah cara logis untuk menerapkan pengetahuan sistem untuk mengisolasi
kesalahan. Ini pada dasarnya adalah perkembangan biner.
Misalnya
sebagai teknisi, Anda akan memeriksa sinyal di suatu titik di tengah-tengah
sistem. Apakah ini baik atau buruk?
Jika
buruk, pilih titik di tengah-tengah antara bagian depan dan bagian depan
sistem; jika bagus, pilih titik di tengah-tengah
antara sana dan output sistem. Sekali lagi, apakah sinyalnya baik atau buruk?
Lanjutkan
dengan cara ini, selalu pisahkan bagian yang tersisa dan bergerak ke arah area
yang buruk sampai Anda menemukan bagian yang salah.
Pada
sistem yang kompleks, metode ini menghemat waktu pemecahan masalah dengan
memungkinkan Anda untuk menghilangkan setengah dari sistem yang tersisa dengan
setiap tes. Apa yang bisa memakan waktu satu jam dalam
pencarian berurutan telah memakan waktu 10 menit atau kurang.
Dokumentasi yang baik juga
diperlukan. Sementara diagram kesalahan atau pohon
pemecahan masalah berguna, dokumentasi terbaik juga akan mencakup penjelasan
tentang operasi sistem dan interaksi sub komponen. Dokumentasi yang baik dan pengalaman
keseluruhan dapat menggantikan pengetahuan peralatan, tetapi hanya saja.
Bahkan
teknisi berpengalaman tanpa dokumentasi tidak akan memiliki ide pertama
bagaimana menemukan masalah dalam sistem yang tidak dikenal kecuali untuk
melacak sinyal melalui titik-demi-titik.
Contohnya
adalah sistem di bawah ini. Ini menggambarkan sistem
komputer dengan sejumlah blok yang berbeda. Salah satu cara untuk menemukan kesalahan ini
adalah mulai di Blok A dan terus memeriksa setiap blok sampai kesalahan
ditemukan, ini akan menjadi pendekatan linier. Namun cara yang lebih efisien untuk menguji
sistem ini adalah memulai pengujian antara blok C dan D. Jika ini berhasil,
maka maju ke pengujian antara E dan F. Jika tidak, maka kembali ke pengujian
antara blok A dan B.
Ini
menggambarkan sistem kecil yang sederhana, namun dalam sistem besar metode
setengah split secara signifikan dapat menghemat waktu.


Selanjutnya: Strategi
Uji
Power
Ringkasan
Proyek ini mengembangkan ilmu pengukuran yang diperlukan untuk
mendukung penggunaan luas elektronik daya canggih untuk menyediakan
fungsionalitas baru di smart grid, sebagaimana diperlukan untuk mendukung
integrasi sumber daya baru dan variabel. Pengenalan energi terbarukan
variabel, beban responsif, penyimpanan dan kontrol lokal ke dalam jaringan
listrik saat ini membutuhkan konversi daya listrik dari satu bentuk ke bentuk
lainnya (AC ke / dari DC dan / atau konversi antara level tegangan yang
berbeda), dan membutuhkan pengkondisian kualitas daya untuk apa yang dibutuhkan
oleh subsistem yang terintegrasi. Fungsi-fungsi ini dilakukan oleh Sistem
Pengkondisian Daya (PCS) yang merupakan enabler utama modernisasi jaringan
skala besar. Proyek ini mengembangkan dan menguji metode pengukuran untuk
PCS, dan mendukung pengembangan standar kinerja terkait untuk menyediakan
integrasi smart grid untuk perangkat ini. Sistem antarmuka PCS dengan smart
grid untuk mendukung aplikasi dari energi terbarukan untuk menghubungkan
kendaraan. Tujuan utama dari proyek ini adalah untuk menunjukkan
interoperabilitas perangkat-perangkat ini dalam skenario microgrid yang
dicontoh laboratorium sebagai pendahulu untuk penyebaran di gedung-gedung
tertentu dan demonstrasi microgrid skala kampus di NIST.
DESKRIPSI
Tujuan: Untuk menetapkan standar dan metode pengukuran, dan menguji
untuk Smart Grid dan Microgrid Power Conditioning System yang diperlukan untuk
bertransisi dari penetrasi rendah saat ini dari sumber energi terbarukan yang
tidak terputus dan tidak terputus ke operasi jaringan fleksibel yang secara
aktif dapat menyesuaikan dengan berbagai kondisi jaringan.
Apa ide teknis yang baru? Istilah Sistem
Pengondisian Daya (PCS) mengacu pada kelas umum perangkat yang menggunakan
teknologi daya elektronik untuk mengubah daya listrik dari satu bentuk ke
bentuk lainnya; misalnya, mengkonversi antara arus searah (DC) dan arus
bolak-balik (AC), dan / atau menyediakan fungsionalitas antarmuka operasional
spesifik yang diperlukan oleh subsistem yang dihubungkan oleh PCS. Banyak
"beban" pada jaringan listrik saat ini sudah dihubungkan melalui PCS
yang menyediakan jenis listrik yang dibutuhkan oleh beban dan juga memberikan
karakteristik antarmuka jaringan yang berharga. Meskipun hanya sebagian
kecil dari pembangkit listrik di grid saat ini berbasis PCS (<< 1%
keseluruhan), tingkat penetrasi generasi dan penyimpanan berbasis PCS meningkat
sangat cepat karena penambahan sumber energi terbarukan / energi bersih yang
menghasilkan DC (misalnya, fotovoltaik dan sel bahan bakar) atau variabel AC
(misalnya turbin angin).
Standar dan implementasi awal untuk integrasi grid pada
pembangkitan dan penyimpanan terdistribusi (Sumber Daya Energi Terdistribusi -
DER) dimaksudkan untuk tingkat penetrasi yang sangat rendah dan tidak dapat
memastikan stabilitas dan keamanan jaringan untuk tingkat penetrasi yang
tinggi. Pendekatan baru dari proyek ini adalah menggunakan PCS untuk
menyediakan antarmuka operasional untuk DER yang lebih baik dalam memenuhi
kebutuhan ini, memungkinkan tingkat penetrasi yang lebih tinggi dan peningkatan
proposisi nilai perangkat DER. Proyek NIST ini memimpin upaya
internasional untuk mengoordinasikan standar dan menguji fungsi dukungan grid
interaktif utilitas PCS yang disediakan oleh DER ("Smart
Inverters"). Proyek ini juga mempelopori kemajuan standar dan tes
untuk arsitektur grid berbasis PCS di masa depan menggunakan microgrids untuk
memungkinkan tingkat penetrasi DER yang sangat tinggi, ketahanan jaringan yang
lebih baik, dan pemulihan dan pemulihan jaringan yang lebih cepat.
Apa rencana penelitiannya? Proyek NIST ini
membahas standar kritis dan kesenjangan metrologi yang diperlukan untuk
mendukung transformasi ke tingkat penetrasi yang tinggi dari generator,
penyimpanan, dan mikrogrid berbasis PCS. Proyek ini memungkinkan DER untuk
digunakan sebagai aset operasional multifungsi untuk mengelola operasi jaringan
lokal dan regional termasuk kemampuan untuk membagi bagian-bagian dari grid
menjadi microgrid yang berkelanjutan dan mandiri. Microgrid mengelola
sumber daya dan operasi lokal mereka sendiri dalam mode grid terhubung dan
pulau, dan muncul sebagai entitas tunggal yang dapat dikontrol ke grid yang
lebih besar. Microgrid adalah konstruksi arsitektur yang memungkinkan
kontrol terdistribusi bertingkat dari jumlah DER yang meningkat pesat, beban
yang dapat dikendalikan, dan perangkat listrik cerdas lainnya yang sedang
terhubung ke jaringan.
Rencana proyek memiliki dua tugas yang membahas: 1) standar untuk
fungsi antarmuka lanjutan dari generator berbasis PCS, penyimpanan, dan
microgrid, dan 2) integrasi aplikasi melalui pengujian kesesuaian dan
interoperabilitas dan transisi ke demonstrasi. Tugas pertama diselesaikan dengan
memanfaatkan Smart Grid Interoperability Panel (SGIP) Terdistribusi, Generator
dan Penyimpanan (DRGS) Kelompok Kerja Domain Expert (DEWG) yang dipimpin oleh
proyek NIST ini. Untuk menyelesaikan tugas kedua, proyek ini merancang dan
membangun dan mengoperasikan Microgrid / PCS Interoperability Testbed di dalam
NIST Smart Grid Testbed (terletak di ruang bawah tanah bangunan 220).
The Microgrid / PCS Interoperability Testbed memungkinkan
pengujian interoperabilitas perangkat dan pengontrol berbasis PCS dalam skenario
microgrid. Laboratorium juga mencakup interkoneksi listrik dan pertukaran
informasi dengan perangkat dan sistem dari Proyek Smart Grid lainnya yang
berlokasi di laboratorium yang berdekatan dalam keseluruhan Smart Grid
Testbed. Microgrid / PCS Interoperability Testbed sedang dikonfigurasikan
untuk mendukung empat skala mikrogrid yang berbeda:
- Thrust A
(microgrid pelanggan perumahan)
- Thrust B
(fasilitas komersial ringan microgrid)
- Thrust C
(microgrids DC)
- Thrust D
(microgrids komersial berat dan industri)
Setiap Dorongan akan terdiri dari empat fase berikut:
- Fase 1:
konfigurasi dan keamanan peralatan listrik
- Fase 2:
konfigurasi dan pengujian peralatan microgrid
- Fase 3:
interkoneksi, praktik, dan pengujian peralatan lab yang berdekatan
- Fase 4: transisi
peralatan microgrid / PCS ke demonstrasi, mis., Peralatan microgrid dan
inverter pintar di netzero house
PRESTASI
BESAR
Hasil Transfer Teknologi::
- Beberapa standar
dalam keluarga IEEE 1547 dan UL1741 telah dikembangkan dan diterbitkan,
membentuk dasar teknis untuk mendukung peningkatan pemanfaatan sumber daya
energi terdistribusi interaktif smart grid-interaktif (DER), dan
peningkatan penggunaan standar ini diantisipasi. Proses pembuatan
peraturan publik juga dilakukan oleh FERC, Komisi Utilitas Publik California
dan lainnya yang merujuk pada perlunya fungsi baru dari standar-standar
ini.
- IEEE 1547.4
untuk aplikasi grid islanding dan IEEE 1547.6 untuk jaringan sekunder
diterbitkan. (TA11)
- UL 1741 Dokumen
Persyaratan Sertifikasi (CRD) "Utilitas Tujuan Khusus Produk
Interaktif Interaktif" diterbitkan. (TA 2013)
- IEEE P1547.8
untuk fungsi DER-grid-interaktif canggih berada di jalur untuk publikasi
tahun ini. (TA 2013)
- IEEE 1547a
(Amandemen 1 ke IEEE 1547) sedang dalam jalur untuk dipublikasikan tahun
ini, dengan modifikasi untuk mengatasi pengaturan tegangan dan frekuensi
naik berdasarkan fungsi baru yang diperlukan untuk mendukung interkoneksi
sumber daya energi yang didistribusikan. (TA 2013)
- IEC 61850-7-420
edisi baru berada di jalur untuk publikasi di FY13 termasuk penyimpanan
listrik multifungsi, antarmuka operasional sumber daya energi
terdistribusi dari IEC 61850-90-7 (diterbitkan tahun ini) dan harmonisasi
dan pemetaan dengan standar lain. (TA 2013)
Bagian depan dan bagian belakang (komputasi)
Dari Wikipedia bahasa Indonesia,
ensiklopedia bebas
Bagian depan dan bagian belakang (bahasa Inggris: Front-end
and back-end) adalah istilah yang merujuk kepada
peringkat awal dan akhir bagi suatu proses. Front-end memiliki
peran untuk mengumpulkan data dalam berbagai bentuk kepada pengguna (user)
lalu memprosesnya untuk memastikan hal ini memenuhi ketentuan yang dapat
digunakan oleh back-end. Front-end merupakan antar
muka antara pengguna dan back-end.
Mengenal
Front Panel Motherboard (Power)
Karena
sekarang sudah banyak yang menulis artikel tentang GNU/Linuxdan Aplikasi Open Source, maka mulai hari ini saya
akan menulis artikel masalah hardware dan hal teknis lainnya. Saya akan
menulisnya dari hal paling sederhana sampai dengan hal yang rumit sesuai study kasus
yang saya alami sebagai teknisi komputer.
Mungkin nantinya ada artikel yang isinya tidak bisa diikuti oleh semua orang karena adanya faktor X yang bisa merusak hardware Anda jika mengalami kegagalan, jika Anda ragu-ragu untuk mempraktekkan isi dari artikel tersebut sebaiknya jangan diikuti.
FRONT PANEL
Front Panel pada motherboard adalah tempat pemasangan kabel antara cassing dengan matherboard, biasanya terdiri dari; Power On/off, Reset, HDD-LED, dan Power LED.
Mungkin nantinya ada artikel yang isinya tidak bisa diikuti oleh semua orang karena adanya faktor X yang bisa merusak hardware Anda jika mengalami kegagalan, jika Anda ragu-ragu untuk mempraktekkan isi dari artikel tersebut sebaiknya jangan diikuti.
FRONT PANEL
Front Panel pada motherboard adalah tempat pemasangan kabel antara cassing dengan matherboard, biasanya terdiri dari; Power On/off, Reset, HDD-LED, dan Power LED.
Front panel
pada motherboard ada bermacam-macam tergantung jenis dan merk motherboard,
paling sering ditemukan adalah jenis Front panel dengan 9 (sembilan) titik
konektor dengan dilengkapi keterangan pada titik konektor yang tersedia.
Pada
sebagian motherboard, keterangan titik konektor tidak ditulis disampingnya,
namun berupa angka 1 sampai dengan 9 dengan
urutan saling berseberangan, biasanya jika menemukan motherboard model atau
jenis ini, keterangan titik konektor ditulis pada salah satu bagian ditengah
motherboard.
Ada juga
motherboard yang titik konektornya cukup banyak, namun jika menemukan
motherboard jenis ini keterangan titik konektor tetap tertulis disampingnya,
lihat ilustrasi dibawah ini.
 |
Ilustrasi
Front Panel pada beberapa jenis motherboard
|
Kadangkala
ada juga motherboard yang tidak mencantumkan sama sekali keterangan titik
konektor, baik angka maupun tulisannya. Hal ini biasanya ditemukan pada
motherbaord yang dijual dalam satu paket PC atau sering dikenal
dengan PC
Built-Up.
 |
Motherboar
tanpa keterangan pada titik konektornya
|
Motherboard
jenis ini sering ditemukan di toko-toko penjual komputer bekas atau 2nd, sudah menjadi rahasia
umum bahwa sebagian orang tidak suka pada komputer Built-Up karena bentuk
cassingnya yang kadang terlalu kuno dan jelek, maka dari itu para pemilik toko
penyedia komputer bekas setiap dapat lelangan komputer Bulit-Up akan
mempretelinya dan part dijual terpisah.
Lha
terus cassingnya dikemanakan?, tentu saja dijual ke pengepul rongsok secara kiloan (nek ditimbang malah abot je).
Kembali ke
pokok artikel tentang front panel, jika menemukan motherboard jenis ini, kita
tidak serta-merta dapat menggunakan pedoman pada salah satu gambar ilustrasi di
atas dikarenakan motherboard jenis ini memang berbeda dengan motherboard pada
umumnya, jika Anda mencari manualnya (panduan PDF) di internet tidak akan
ditemukan, karena memang tidak disediakan oleh vendornya, kalau pun ditemukan
isinya malah panduan cara membuka cassing PC tersebut.

Untuk tukang service komputer yang memang mempunyai dasar elektronik hal ini tidak menjadi
masalah, sebab jalan keluarnya dengan mudah dapat dicari menggunakan alat yang
sering digunakannya, misalnya dapat menggunakan Multimeter/avometer, kalaupun
tidak memiliki alat tersebut masalah ini dapat diselesaikan dengan meneliti
jalur pada motheroard.
Kasusnya sedikit berbeda jika tukang servis
komputer tidak memiliki dasar elektronik, maka dia akan kebingungan mencari
mana titk power
on/of mana
untuk Power
HDD, dan
hal ini memang sering terjadi karena kebanyakan para tukang servis komputer
tidak memiliki dasar elektronik dengan baik hal ini disebabkan karena sebagian
besar adalah berasal dari Sarjana TIK.
Pada
artikel ini saya memberi contoh penyelesaian masalah diatas dengan motherboard
merk samsung, langsung saja lihat gambar dibawah ini

Cara ini
dapat diterapkan pada Motherboard merk HP, Compaq, LG, dan Acer, namun tidak bisa diterapkan pada motherboard keluaran IBM (untuk motherboard
IBM saya tulis lain waktu jika saya sudah dapat contohnya)
Dibawah ini
foto yang saya ambil setelah kabel dari cassing sudah dipasang pada titik
konektor front panel

Dibawah ini
adalah foto Tombol Power, Lampu Indikator HDD LED dan Power LED pada Cassing
tanpa tombol Reset, tombol reset saya copot karena tidak berguna (lha di
motherboardnya tidak ada fasilitas untuk tombol reset)

Demikian
Artikel singkat yang saya tulis kali ini, sampai jumpa pada tulisan lainnya
dengan tema dan kasus yang berbeda
Apa itu Front Panel Dan
Back Panel
Apa itu
Front Panel Dan Back Panel-Saat pertama kali kalian membeli motherboard dan
inggin merakitnya pasti ada kabel kecil-kecil yang memiliki masing-masing
fungsi tersendiri, Pada Artikel kali ini saya akan membahas tentang Apa
itu Front Panel Dan Back Panel


Front panel dan
Back Panel Mempunyai fungsi yang berbeda, pertama saya akan bahas yang front
panel terlebih dahulu.
Front Panel
Front panel
adalah bagian depan dari casing komputer yang memuat instruksi dan informasi
bagi user seperti mengetahui harddisk sedang sibuk atau tidak, mempermudah
menyalakan dan merestart komputer
Untuk jenis
PC/casing keluaran terbaru untuk front panel biasanya sudah menambahkan fitur
USB front panel, beberapa yang ditujukan untuk segmen ke atas dibekali dengan
slot Card reader, port audio out bahkan lcd monitoring system.
Koneksi front
panel langsung menuju motherboard lewat jumper front panel biasanya berada
dibagian kanan bawah dari motherboard. Konektor ini berupa jumper 2 pin Power
Switch, jumper 2 pin Reset Switch, jumper 2 pin HDD.Led dan 2 jumper 1 pin
power Led, beberapa motherboard memiliki variasi lain, tetapi secara garis
besar bisa dikategorikan seperti tersebut diatas.
Back
Panel
Back Panel
adalah bagian belakang casing yang berfungsi sebagai interkoneksi komponen
komputer.
Beberapa Socket
(titik penghubung komunikasi) yang ada diback panel
1.Socket ps/2
mouse dan keyboard
2.Socket port
audio
3.Socket
listrik AC pada power supply/PSU
4.Socket serial
COM port
5.Socket
Parallel port
6.Socket VGA
port
7.Socket USB
port
8.Socket
Ethernet LAN port/RJ45
Berikut fungsi
dari masing-masing socket :
1.Socket ps/2
Mouse dan Keyboard
Berfungsi
untuk menyambungkan komputer dengan Keyboard dan mouse Konektor berwarna hijau
6 pin ini adalah socket untuk colokan Keyboard Konektor berwarna ungu 6 pin ini
adalah socket untuk colokan Mouse
2.Socket Port
Audio
Socket
ini berfungsi sebagai perangkat audio pada komputer/PC.Pada mesin standart
terdiri dari tiga colokan,masing-masing colokan /soket tersebut berwarna hijau
yang berfungsi sebagai audio output (mengeluarkan suara/audio),colokan berwarna
merah untuk Input line Mic,colokan berwarna merah untuk audio line in (
memasukkan suara/audio dari luar komputer/PC )
3.Socket
Listrik AC pada Power Supply
AC socket
adalah jalan masuk begi tegangan . AC jala-jala listrik ke dalam modul rangkain
power supply. AC socket berisi 3 pin, yaitu 2 pin untuk tegangan AC dan
1 pin untuk ground. Penyambungan Ground pada power supply komputer sangat
penting untuk menetralisir tegangan bocor pada proses induksi SMPS (SWITCHED
MODE POWER SUPPLY)
4.Socket
Serial COM port
Serial
Port merupakan sebuah port pada personal computer yang berfungsi untuk
mentransmisikan satu bit informasi pada satu satuan waktu. Dalam serial port,
pengiriman informasi tidak memungkinkan untuk melakukan secara banyak sekalius.
Hal ini disebabkan karena dalam melakukan pemindahan data, biasanya serial port
bekerja seri, misalnya COM 1 dan COM 2.
5. Socket
Parallel port
Parallel
port merupakan sebuah port pada personal computer yang berfungsi sebagai alat
komunikasi komputer (motherboard) dengan perangkat luar yang bersifat paralel.
Pada port paralel, pemindahan informasi dapat dilakukan secara bersamaan
sehingga informasi yang terkirim lebih banyak daripada port seri. Port paralel
biasa dikenal dengan Printer Port atau Centronics Port. Fungsi port paralel
adalah sebagai penghubung motherboard dengan Printer jenis lama, Zip drive,
beberapa Scanner, Sound Cards, Web Cams, Gamepads, Joystick, pemrograman EPROM,
peralatan SCSI melalui adapter paralel ke SCSI, percobaan dengan TTL 12 driver,
dan External CD-R atau CD-RW. Selain itu, port paralel juga digunakan sebagi
uji coba sederhana dalam perancangan peralatan elektronika.
6. Socket VGA
port
Soket VGA
adalah port pada komputer, biasanya ditemukan di motherboard atau kartu video
pada motherboard, yang digunakan untuk menghubungkan komputer ke perangkat yang
menampilkan video. Teknologi VGA pernah menjadi standar untuk koneksi video
komputer, namun karena keterbatasan kualitas gambar telah menyebabkan sejumlah
standar lain sedang dikembangkan yang masih terus memanfaatkan koneksi fisik
VGA.
Sebuah
soket VGA biasanya berwarna biru dan memiliki koneksi port 15 pin tempat
memasukkan kabel VGA yang digunakan untuk menghubungkan komputer ke monitor.
Video Graphics Array (VGA) pernah menjadi standar untuk menampilkan grafis
komputer, dan tidak hanya mengacu pada standar itu sendiri, tetapi juga ke
soket VGA dan kabel yang digunakan untuk menghubungkan perangkat menggunakan
standar
Ada
sejumlah keuntungan teknologi standar ini dari standar sebelumnya, salah
satunya adalah kualitas tampilan gambar. Standar VGA mampu menampilkan pada
resolusi 800×600, ini masih rendah bila dibandingkan dengan standar yang datang
setelah itu, tetapi lebih tinggi dari resolusi sebelumnya. Standar ini juga
dapat menampilkan 256 warna, jauh lebih besar daripada standar sebelumnya yang
sering ditampilkan hanya 64 warna. VGA standar masih digunakan oleh perangkat
portabel dan komputer lama.
7. Socket USB
port
Port USB
adalah hubungan serial antara periferal dengan komputer. Port USB merupakan
suatu teknologi yang memungkinkan kita untuk menghubungkan alat eksternal
seperti scenner, printer, mouse, papan ketik (keyboard), alat penyimpan data
(zip drive), flash disk, kamera digital atau perangkat lainnya kekomputer kita.
Komputer (PC) saat ini, umumnya sudah memiliki port USB. Biasanya disediakan
minimal 2 port. Jika dibandingkan dengan parallel port dan serial port,
penggunaan port USB lebih mudah dalam penggunaannya. Konektivitas antara PC
(Personal Computer) dengan perangkat USB dihubungkan dengan kabel khusus.
Sebuah kabel berisi empat buah kawat menghubungkan periferal ke PC melalui port
USB yang terdapat pada keduanya. Di dalam kabel tersebut, dua kawat akan
menangani transmisi data, sebuah lagi menangani ground dan sebuah lagi memasok
daya sebesar lima volt ke peripheral.
8. Socket
Ethernet LAN port
RJ-45
Port,Port 25-pin ini menghubungkan konektor LAN melalui sebuah pusat Port ini
digunakan untuk menghubungkan komputer satu dengan komputer lainnya (jaringan
LAN) Juga berfungsi menghubungkan CPU dengan jaringan komputer.Port ini juga
biasa digunakan untuk menyambungkan komputer dengan internet.
Semoga Artikel
Ini dapat Membantu kalian yang ingin Mengetahui Tentang Apa itu Front
Panel Dan Back Panel
Breaking the Loop: How to use higher order functions to
process arrays in JavaScript
There’s a better way to iterate over
your Arrays than using a ‘for’ loop or a ‘while’ loop. I’ll show you how to use
‘forEach’, ‘map’, and ‘reduce’, for cleaner, more modular code.

Sep 28, 2016
Somewhere around the second week of your first JavaScript course, you were no doubt introduced to the Array. Arrays are pretty neat! Instead of having to work with values one at a time, you had a way to bundle your values up into a nice data structure that you could refer to with one variable name. You could add multiple values to the Array and easily use them all throughout your code just by referring to their index. And you no doubt used everyone’s favorite variable ‘i’ with a ‘for’ loop or a ‘while’ loop to do so.
But there’s a problem with this approach. Pretty
quickly, you probably noticed you were copying-and-pasting loop code; a
telltale sign that your code may not have been DRY. Beyond the actual loop control statement, you didn’t have an easy way
to reuse logic inside the loop. Using higher order functions to process your
Arrays can fix both issues. Let’s look at some common patterns you may have
come across and then utilize higher order functions to refactor them.
Perhaps you needed to take each value in the Array and
send it off to another function as an argument, like logging each value to the
console. A ‘for’ loop would get the job done:
// Call console.log with each value in the Array
// as an argument
var names = ['Sonny', 'Joel', 'Isabelle', 'Henry'];
for (var i = 0; i < names.length; i++) {
console.log('Hello '+ names[i]);
}
// Logs:
// "Hello Sonny"
// "Hello Joel"
// "Hello Isabelle"
// "Hello Henry"
Another common scenario you eventually ran across is
needing perform some operation on each value in the Array and save the result
in a new Array. A ‘for’ loop would have worked here too, but you could’ve also
used a ‘while’ loop, incrementing ‘i’ along the way:
// Double each value in an Array; produce a
// new Array with the same length as the original
var numbers = [0, 1, 2, 3];
var i = 0;
var doubles = [];
while (i < numbers.length) {
doubles[i] = numbers[i] * 2;
i++;
}
// doubles is: [0, 2, 4, 6]
You may have also found yourself in a situation where
you needed to use all the data contained in the Array to find a single result.
You may have wanted to find the sum of all the values in an Array of numbers,
or you may have wanted to find the longest word in an Array of Strings:
// Find the longest word in an Array of Strings
var words = ['space', 'moon', 'crater'];
var longestWord = '';
for (var i = 0; i < words.length; i++) {
if (words[i].length > longestWord.length) {
longestWord = words[i];
}
}
// longestWord is: 'crater'
Typing out that ‘for’ loop over and over was repetitive
and made your code hard to reuse. You need a better solution.
forEach,
map, and reduce to the rescue
Luckily for you and I, JavaScript Arrays come
pre-packaged with three methods that solve this problem. The ‘forEach’, ‘map’,
and ‘reduce’ methods are all higher order functions, or functions that take a separate function
as an argument. With these Array methods, the argument is a function referred
to as the ‘callback’.
I’ll get around to explaining the details of how to use
each of these methods in a minute, but one of the trickiest parts is knowing
which one to use in the first place.
To determine which Array iteration method to use, ask
yourself: what do I want the immediate result of this operation to be?

forEach
If you ask yourself, “what do
I want the immediate result of this operation to be?” and
there isn’t an answer that you could store in a single variable, then ‘forEach’
is the method for you. ‘forEach’ doesn’t return a value at all, but it will
take each item in the Array in sequence and send it to your callback, along
with the index of the item, and a reference to the entire Array. ‘forEach’ is
useful when you need to send each item to a separate function, like the
console’s ‘log’ function, and we can use it to refactor our first example.
We’ll add a slight twist and also log the index of each name in the Array, as
well as the length of the Array:
// Use forEach to iterate over each item in the Array,
// calling our callback function with the item's value,
// the item's index, and a reference to the entire Array
// as arguments
var names = ['Sonny', 'Joel', 'Isabelle', 'Henry'];
names.forEach(function(currentValue, index, array) {
console.log(index + ' of ' + array.length + ': ' + currentValue);
});
// Logs:
// "0 of 4: Sonny"
// "1 of 4: Joel"
// "2 of 4: Isabelle"
// "3 of 4: Henry"
Pretty cool — no more loop! If the callback function pattern is new to
you, don’t worry, you’ll get the hang of it quickly. But keep in mind that the
names you assign to your arguments don’t matter, but the order does.
So you could rename the variable ‘index’ to ‘i’ and still get the same result:
// Renaming the variable in the callback has no effect
var names = ['Sonny', 'Joel', 'Isabelle', 'Henry'];
names.forEach(function(currentValue, i, array) {
console.log(i + ' of ' + array.length + ': ' + currentValue);
});
// Still logs:
// "0 of 4: Sonny"
// "1 of 4: Joel"
// "2 of 4: Isabelle"
// "3 of 4: Henry"
However, whatever names you choose for arguments, the
first will always be set to the item’s value, the second to the item’s index,
and the third to a reference to the entire Array:
// The ORDER of the callback arguments matters, not the names
var names = ['Sonny', 'Joel', 'Isabelle', 'Henry'];
names.forEach(function(index, currentValue, array) {
// Watch out! 'index' now contains the item's value,
// while 'currentValue' now contains the item's index
console.log(index + ' of ' + array.length + ': ' + currentValue);
});
// Logs something we didn't want:
// "Sonny of 4: 0"
// "Joel of 4: 1"
// "Isabelle of 4: 2"
// "Henry of 4: 3"
I mentioned that forEach doesn’t return a value, but
also note that our callback function doesn’t need to return a value either. If
it did return a value ‘forEach’ wouldn’t store it anywhere and we’d have no way
to reference it.
But what if we do want our Array operation to return a
value? That’s where our next two methods come in.
map
If you ask yourself, “what do
I want the immediate result of this operation to be?” and
the answer sounds something like, “I want a copy of this Array, but with each
value in it modified in some way,” then ‘map’ is the method for you.
‘map’ takes a callback of exactly the same
signature as the ‘forEach’ callback, but with ‘map’ our callback needs to
return a value. This return value will get stored in the corresponding index of
the current item in the iteration, but in a new Array that ‘map’ will
eventually return.
Let’s refactor our doubling example using ‘map’:
// Use 'map' to double each value in an Array; produce a
// new Array with the same length as the original
var numbers = [0, 1, 2, 3];
var doubles = numbers.map(function(currentValue, index, array) {
return currentValue * 2;
});
// doubles is: [0, 2, 4, 6]
Much cleaner! We’ve fixed the problem of typing the
‘for’ or ‘while’ loop over and over, but what if we wanted to reuse our
callback function elsewhere in our application. We’ve been defining our
callback as an anonymous function directly in the method invocation, but we can
refactor the callback out like so:
// Use 'map' to double each value in an Array, passing
// in a callback by variable reference
var numbers = [0, 1, 2, 3];
var double = function(n) {
return n * 2;
};
var doubles = numbers.map(double);
// doubles is still: [0, 2, 4, 6]
Now we can reuse our callback elsewhere in our
application, perhaps as an argument to other higher order functions.
We’ve examined ‘forEach’ and ‘map’; let’s take a look at
our last method.
reduce
Once again you’ll start by asking, “what do
I want the immediate result of this operation to be?” and
if the answer is a single value,
we’ll use ‘reduce’. ‘reduce’ takes a callback similar to ‘forEach’ and ‘map’,
but with one additional argument. This argument, sometimes called
‘previousValue’ or ‘accumulator’, comes first in the callback’s list of
arguments, and it keeps track of the result of whatever we’re doing as we
iterate over each item in the array. Our callback needs to return a new value
for the accumulator during each iteration. After we’ve iterated over every item
in the Array, it’s the value of the accumulator that gets returned by ‘reduce’.
Along with the callback, we can pass a second, optional argument to ‘reduce’.
This will be the initial value of the accumulator as we enter the callback with
the first item in the Array. If we omit this second argument and only pass
‘reduce’ a callback, then the accumulator is set to the value of the first item
in the Array, and the iteration starts with the second item in the Array. An
obvious use of ‘reduce’ is to find the sum of the numbers in an Array, so let’s
take a look at that case first:
// Get the sum of the numbers in an Array using 'reduce'
var numbers = [1, 2, 3];
var sum = numbers.reduce(function(accumulator, currentValue) {
return accumulator + currentValue;
}, 0);
// sum is: 6
Here we passed in an initial value of zero for the
‘accumulator’, so our iteration started with the first item in the array. We
could’ve left off that second argument to ‘reduce’ and still obtained the same
result:
// Get the sum of the numbers in an Array using 'reduce', but
// without passing an initial value for the accumulator
var numbers = [1, 2, 3];
var sum = numbers.reduce(function(accumulator, currentValue) {
return accumulator + currentValue;
});
// sum is still: 6
Since we didn’t pass an initial value for the
accumulator, the accumulator is set to the value of the first item in the
array, 1, and ‘reduce’ starts iterating at the second item in the Array.
Up until now, we’ve only used the accumulator and the
current item value in our callback. But the callback is invoked with the index
of the current item as well as a reference to the entire array, similar to the
‘forEach’ and ‘map’ callbacks. Let’s use the items index to find the sum of the
numbers in the Array at even indexes:
// Sum the numbers at even indexes
var numbers = [1, 2, 3];
var sum = numbers.reduce(function(accumulator, currentValue, index) {
if (index % 2 === 0) {
return accumulator + currentValue;
} else {
return accumulator;
}
});
// sum is: 4
Here 1 and 3 are at even indexes (remember that Array
indexes start at 0) and so our sum is 4.
Summing the values in the Array is an obvious use case
for ‘reduce’, but remember I said that any time we want a single
value as the result of our operation then we need to use
‘reduce’. With that in mind, let’s use it to refactor our code that found the
longest word in an Array of Strings. Here it makes sense to think of our
accumulator as keeping track of the longest word found so far, so let’s name it
‘longestFound’:
// Use 'reduce' to find the longest word in an Array of Strings
var words = ['space', 'moon', 'crater'];
var longestWord = words.reduce(function(longestFound, currentValue) {
if (currentValue.length > longestFound.length) {
return currentValue;
} else {
return longestFound;
}
});
// longestWord is: 'crater'
Our accumulator ‘longestFound’ is automatically set to
the value of the first item in the Array, ‘space’. ‘reduce’ starts iterating at
the second item, and if that item’s value is longer than ‘longestFound’ then we
reset ‘longestFound’ to that item’s value by returning it. We can even refactor
out the callback to make our code more modular:
// Return the longest word in an Array of Strings using
// 'reduce' and a reusable callback function
var words = ['space', 'moon', 'crater'];
var longest = function(word1, word2) {
if (word1.length >= word2.length) {
return word1;
} else {
return word2;
}
};
var longestWord = words.reduce(longest);
// longestWord is still: 'crater'
Here we’ve defined a function ‘longest’ which takes two
words and returns the longer of the two (or the first if they have equal
lengths). We’re using it as the callback for ‘reduce’, but we can use it again
throughout our application.
‘reduce’ has many interesting and perhaps
non-obvious use cases. As long as you want your Array operation to result in
a single value, you can put ‘reduce’ to work. Suppose
we’d like to test our Array to see if a particular value is present. Since the
result of that operation is a boolean (‘true’ if the value is present and
‘false’ if it isn’t), and a boolean is a single value, we
can use ‘reduce’. Here it’s useful to think of your accumulator as keeping track
of whether or not the target value has been found, so we’ll rename it once
again:
// Use 'reduce' to test an Array for the presence
// of a specific value
var words = ['space', 'moon', 'crater'];
var alienFound = words.reduce(function(targetFound, currentValue) {
if (currentValue === 'alien') {
return true;
} else {
return targetFound;
}
}, false);
var moonFound = words.reduce(function(targetFound, currentValue) {
if (currentValue === 'moon') {
return true;
} else {
return targetFound;
}
}, false);
// alienFound is: false
// moonFound is: true
Here our accumulator starts off as ‘false’, but if we
iterate over an Array item that matches the word we’re looking for we set it to
‘true’. Otherwise we return the current state of whether or not the target
value has been found.
Hopefully by now when you think, “I’d like to get
a single value out of this Array operation,”
‘reduce’ comes to mind, but I have a slight twist for you: that single value
can also be an Array. If you want the result of the operation to also be an
Array, but without a one-to-one relationship between the values in the input
Array and the values in the resulting Array, then we can once again use
‘reduce’. Let’s use it to filter an Array of numbers to only the numbers that
are evenly divisible by 3. Here our accumulator is the resulting Array, which
we’ll call ‘result’ and initially sent to an empty Array literal:
// Use 'reduce' to filter an Array of numbers
// producing an Array of numbers divisible by 3
var numbers = [1, 3, 7, 9, 11, 12];
var divisibleByThree = numbers.reduce(function(result, currentValue) {
if (currentValue % 3 === 0) {
return result.concat(currentValue);
} else {
return result;
}
}, []);
// divisibleByThree is: [3, 9, 12]
As we iterate over the Array, we test the current value
to see if it’s evenly divisible by 3. If it is we add it to our ‘result’ Array
with ‘concat’ and return the result of that operation as the new accumulator.
Otherwise, we leave the accumulator unchanged by simply returning it.
the loop
Using higher order functions to iterate over your Arrays
may seem intimidating at first, but with a little practice you’ll find yourself
reaching into your virtual toolbox and pulling out ‘forEach’, ‘map’, and
‘reduce’ as easily as you would that ‘for’ loop. In no time you’ll find that
you’re producing more modular, reusable, and DRYer code.
If you find a great, unexpected, usual, or surprising
use case for ‘forEach’, ‘map’, or ‘reduce’, I’d love to hear about it in the comments!
·
·
Inspeksi visual
Terlepas dari kemajuan teknologi dalam teknik inspeksi, teknik inspeksi / tes utama dan terpenting adalah inspeksi visual.
Waktu telah membuktikan bahwa inspeksi visual adalah teknik yang paling efektif. Teknik lain dapat digunakan jika dan ketika lasan atau bagian yang diperiksa dianggap dapat diterima secara visual sesuai persyaratan spesifikasi.
Inspeksi Visual adalah metode inspeksi yang sangat efektif, dan harus menjadi metode utama yang termasuk dalam Program Kontrol Kualitas yang efektif. Berulang kali telah ditunjukkan bahwa, “Inspeksi visual” yang dilakukan oleh inspektur yang terlatih dengan baik, menghasilkan penemuan sebagian besar cacat yang hanya akan ditemukan kemudian dengan metode pengujian non-destruktif yang lebih mahal. ”
Sementara inspeksi visual terbatas pada pemeriksaan permukaan saja, sering mendeteksi cacat yang paling merusak. Inspeksi visual (disingkat "VT") oleh American Society for Non-destructive Testing (ASNT) dari komponen yang dilas membutuhkan inspektur untuk memiliki pengetahuan luas tentang banyak teknologi, termasuk pengelasan, pengujian destruktif, pengujian non-destruktif, dan metalurgi, juga sebagai terminologi yang benar untuk masing-masing.
Karena pentingnya teknik ini, kursus pelatihan pertama dan persetujuan inspeksi setiap teknisi EIS akan menjalani inspeksi visual PCN.
Jaminan kualitas las adalah penggunaan metode dan tindakan teknologi untuk menguji atau memastikan kualitas las, dan yang kedua untuk mengkonfirmasi keberadaan, lokasi, dan jangkauan las. Dalam pembuatan, las digunakan untuk menggabungkan dua atau lebih permukaan logam. Karena koneksi ini mungkin menemui banyak dan kelelahan selama masa pakai produk, ada kemungkinan mereka gagal jika tidak dibuat dengan spesifikasi yang tepat.

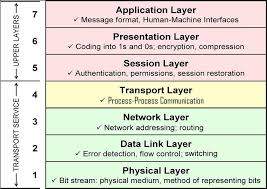{kind=link}
Tidak ada komentar:
Posting Komentar